1、高速三通道实时同步采样存储技术,高达2GSPS、14bit的采样率与采样精度存储数据。
2、纳秒级门控技术,分离大动态范围变化的水面、水底回波信号。
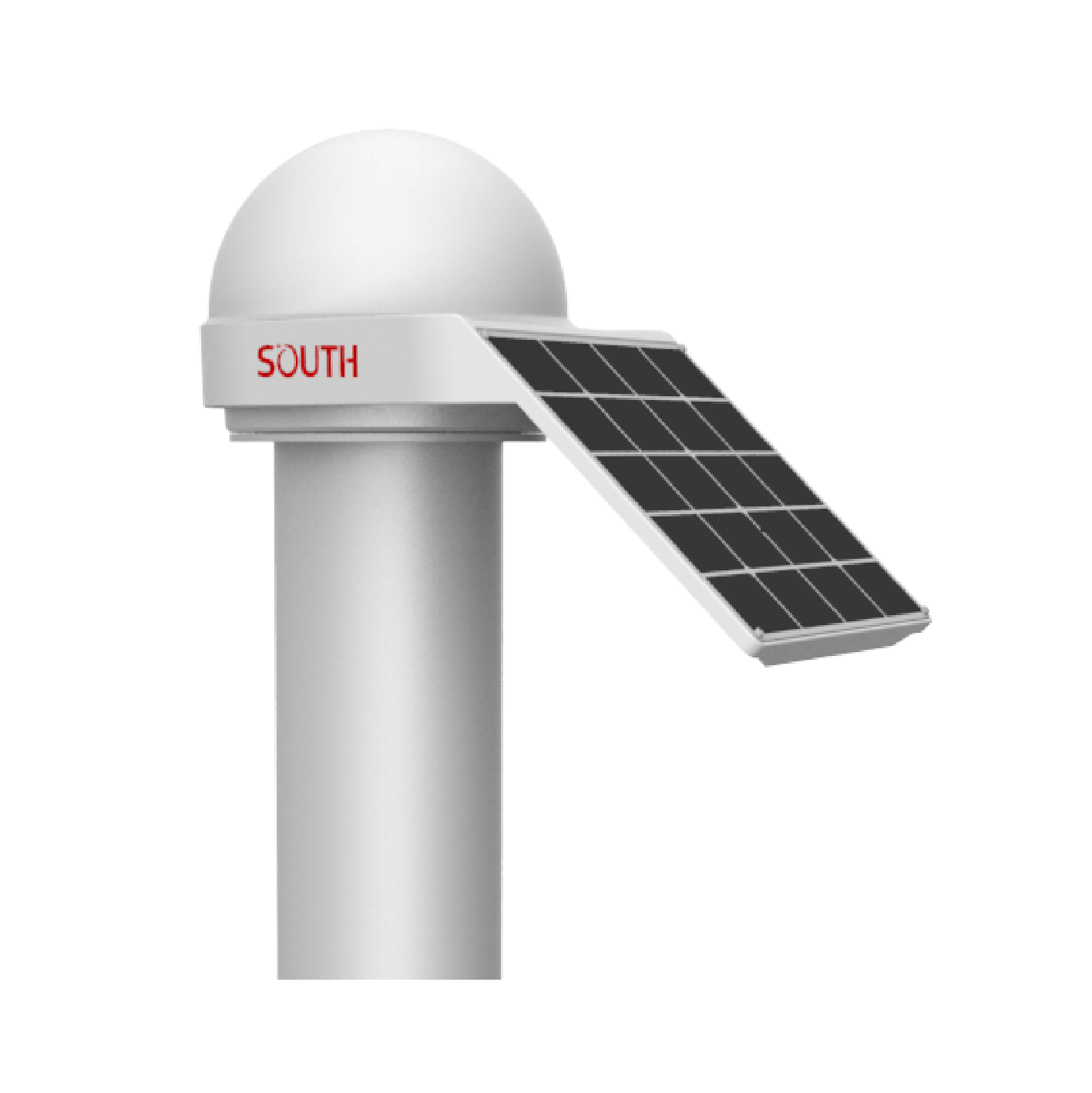
3、镁铝合金外壳轻巧紧凑、坚固耐用,适用多种无人飞行搭载平台。
4、自反馈PMT探测装置,可灵活适应不同水域环境。
5、探测水深范围为0.3-20m;最大测量面积1km²/h。
浅水水深测量/水底地形测绘/水下目标探测/暗礁、水底涌流探测/水生生态环境监测/自然灾害应急响应/浮游生物资源探测
指标 | 参数 |
激光产品等级 | Class IIIb 级激光 |
测量原理 | 脉冲飞行时间测量,回波信号数字化,在线波形处理 |
激光脉冲发射频率PRR | 50 kHz~220 kHz |
最大量测范围(飞行高度为75m) | 最大水深探测:2.0塞氏盘深度@50kHz; 2.6塞氏盘深度@0.5kHz((后处理波形频率50kHz)); |
建议作业飞行高度 | 最小测量作业高度:20m |
最小测量作业高度:200m | |
目标回波接收的最大数值 | > 15 |
最小测量深度 | 0.3 m |
距离精度 | 20 mm |
重复精度 | 15 mm |
激光波长 | 532 nm±2 nm |
激光发散全角 | < 2 mrad |
激光光斑直径大小(以发散全角1 mrad计算) | 50 mm @ 50m, 100 mm @ 100 m, 150 mm @ 150m,200 mm@200 m |
扫描仪性能参数 | |
扫描机械原理 | 旋转楔子反射镜 |
视场角 | ±22.5°=45°(椭圆形扫描模式) |
扫描速度(可调节) | 0-200转/分 |
角步分辨率 | 0.001° |
IMU/GNSS(可选) | |
IMU精度 | 俯仰角,翻滚角:0.006° 航向角0.03° |
IMU采样速率 | 200 Hz(实时)2000 Hz(后处理) |
位置精度 | 水平方向<0.01m,垂直方向<0.02m |
接口 | |
数据与外接设备输出交流端口 | LAN1000 Mbit/sec |
POS数据接口 | RS232用于传输包含GNSS时间信息的数据流 TTL输入1PPS同步脉冲 |
电源输入电压 | 20~28 V DC |
主要规格 | 350 mm×320 mm×200 mm |
重量 | < 9 kg |
温度范围 | -10℃~+40℃(使用) / -20℃~+50℃(存储) |